
เพื่อนหลายคน พอเห็นผมเล่นโดรน ก็พูดกับผมว่า “เจ๋งว่ะ ตอนรถติดเราก็ปล่อยโดรนบินไปดูได้เลย ว่ามันติดไปถึงไหน!”
ประโยคนี้แสดงให้เห็นครับ ว่าคนทั่วไปไม่ได้มีความรู้ความเข้าใจเกี่ยวกับการเตรียมตัวก่อนบินโดรนเลย (ก่อนผมจะมาเล่นโดรนก็เช่นกัน) เพราะเรานึกว่า แค่เปิดเครื่อง ก็ขึ้นบินได้ทันที ซึ่งก็อาจจะใช่นะครับ สำหรับโดรนรุ่นเล็ก ๆ ที่เป็นของเล่นอันเท่าฝ่ามือ แค่ pair สัญญาณตัวลำกับ controller เสร็จก็บินได้ละ แต่สำหรับโดรนรุ่นกลางที่ราคาหลักหมื่นขึ้นมานี่ มันมีอุปกรณ์มากขึ้น มีระบบมากกว่า ทำให้การเตรียมพร้อมใช้เวลามากขึ้น แต่ก็เพื่อให้สามารถบินได้อย่างปลอดภัย ลดโอกาสในการตกได้มากขึ้นนั่นละครับ แต่มือใหม่หลายท่าน เมื่อซื้อโดรนมาเล่นแล้ว ก็นำขึ้นบินเลย ด้วยทัศนคติแบบเดิม ๆ ความเข้าใจแบบเดิม ๆ ก็เลยเริ่มมีเคส drone crash ให้เห็นมากมายทั่วโลก เพราะตอนนี้ everyone can fly จนชาวโดรนมือเก๋า ต้องออกมาเตือนสติมือใหม่กันว่า
“Drone is not a toy!”
มันไม่ใช่ของเล่นครับ มันคือเครื่องบินบังคับ ที่เราต้องให้ความสำคัญกับอินเทกริตี้ (integrity) ในการบิน มากพอ ๆ กับอากาศยานอื่น ๆ ทุกประเภทนั่นแหละครับ
…
การทำ pre-flight check ก่อนขึ้นบิน จึงสำคัญมาก ๆ ครับ เป็นการเตรียมพร้อมอุปกรณ์ และบินขึ้นต่ำ ๆ เพื่อทดสอบในเบื้องต้นว่า มีอาการแปลก ๆ อะไรหรือไม่ เป็นการเปลืองแบต เสีย flight time ไป 2-3 นาทีที่คุ้มค่า เพราะแลกมาด้วยความปลอดภัยที่มากขึ้น ให้มั่นใจว่าอุปกรณ์มีความสมบูรณ์เพียงพอ แล้วจึงเอาขึ้นบินจริงครับ
ขั้นตอน pre-flight check ที่ผมใช้เป็นการส่วนตัว กับ Phantom 3 มีง่าย ๆ ดังนี้ครับ
 1. ตรวจสอบแรงลม และ K-Index
1. ตรวจสอบแรงลม และ K-Index
ผมใช้ app Yahoo Weather ตรวจสอบแรงลมคร่าว ๆ ครับ ถ้าแรงกว่า 30 km/h ไม่ควรบิน
และใช้ app EMVI ตรวจสอบค่า K-Index หรือ พายุสุริยะ ถ้าค่านี้สูง จะมีผลกระทบต่อสนามแม่เหล็กโลก ซึ่งอาจจะทำให้ compass หรือเข็มทิศของตัวลำทำงานผิดปกติได้ครับ ถ้า K-Index > 4 ก็ถือว่าเสี่ยงที่จะมีผลกระทบครับ (ยังไม่เคยลองบินในวันที่ K-Index > 4 เหมือนกัน อันนี้ฟังระดับเซียนเค้าแนะนำมา เลยเอามาเขียนต่อ อวดภูมิเรื่องนี้แล้วผมดูเป็นมือโปรขึ้น 42.26%)
2. เช็ค controller
เช็คแบตเตอรี่ ไม่ควรต่ำกว่า 2 ขีด แล้วเปิด controller ก่อนตัวลำ
3. เช็คตัวลำ
วางตัวลำบนพื้นราบ ปลด gimbal lock ออกให้เรียบร้อย ก่อน turn on ตัวลำ เพราะตอน gimbal ทำการ warm up มันจะมีการขยับทุกองศา ถ้าเราลืมเอาตัว lock ออก แล้วเผลอเปิดเครื่อง gimbal ก็ไม่สามารถเคลื่อนไหวเพื่อทำการ check ตัวมันเองได้ อันนี้เสี่ยงที่จะพังนะครับ เหมือนมันจะขยับเพื่อเชคแล้วเราไปฝืนมัน ไม่ให้มันเคลื่อนไหว และ gimbal มันก็จะจำระนาบตอนที่มัน warm up นี่แหละครับ ดังนั้น ถ้าเราวางตัวลำบนพื้นเอียง เป็นไปได้สูงที่เมื่อบินขึ้นไปแล้ว กล้องเรามันก็จะเอียงครับ ตรวจสอบจากแอพดูว่า controller กับตัวลำ pair กันเรียบร้อยหรือไม่ ภาพจากกล้องส่งออกจอเรียบร้อยดีหรือเปล่า (อย่าลืมเชคแบตเตอรี่ของ smartphone ที่เราใช้เป็นจอด้วยครับ)
4. Calibrate Compass
อันนี้หลายท่านบอกว่า ควรจะทำทุกครั้ง ไม่มีผลเสีย มีแต่ผลดี แต่หลายท่านก็บอกว่า ถ้ามันไม่ฟ้องให้ calibrate ก็ไม่ต้องทำก็ได้ ส่วนตัวผมทำตาม manual ครับ คือเค้าระบุให้ทำทุกครั้งที่เปลี่ยนสถานที่บิน และเห็นด้วยว่า มันไม่มีผลเสีย กลับกันจะช่วยให้อุปกรณ์เราทำงานได้อย่างสมบูรณ์มากขึ้นครับ ข้อควรระวังคือ ถ้าเราอยู่ในที่ที่มีเหล็กเยอะ ๆ เช่น สะพานเหล็ก (หมายถึงสะพานที่เป็นเหล็ก ไม่ใช่ตลาด) หรือใต้พื้นปูนที่มีเหล็กเส้นเยอะ ๆ เนี่ย มันจะกวนเข็มทิศครับ ทำให้ compass error และ calibrate ไม่ได้ ต้องยกตัวลำให้สูงจากพื้นมาก ๆ หรือเปลี่ยนสถานที่ครับ
หาก compass error นี่เสี่ยงสูงครับ เพราะตัวลำจะหลงทิศ ซึ่งข้อนี้สำคัญนะครับ ไม่เพียงแค่ pre-flight เท่านั้น แต่ควรวางแผนเส้นทางบินด้วย โดยเฉพาะถ้าเราไม่ได้บินในที่โล่ง อาจจะมีความเสี่ยงจากการโดนกวนจากสภาพแวดล้อมในขณะบินจน compass error มากแค่ไหนในเส้นทางการบินเรา ควรวางแผนการบินทุกครั้งครับ
5. ตั้งค่าความสูง Return Home (RTH)
เมื่อหลุดสัญญาณโดยบังเอิญ แล้วเครื่องเข้าโหมด RTH ให้มั่นใจว่าเราตั้งความสูงที่สูงพอที่เครื่องจะหลบหลีกสิ่งกีดขวางรอบข้างนะครับ หากตอนหลุดสัญญาณ ตัวลำอยู่ต่ำกว่าที่ตั้งไว้ มันจะบินขึ้นตรง ๆ จนถึงความสูงที่กำหนด แล้วค่อยบินกลับครับ แต่ถ้าอยู่สูงกว่าอยู่แล้ว มันก็จะบินกลับไปยังตำแหน่ง home ที่ล๊อค GPS ไว้เลย อันนี้ช่วยแก้ปัญหาหลุดสัญญาณตอนเราบินต่ำ ๆ แล้วเครื่องเข้าโหมด RTH บินกลับมาแต่ไม่ถึงบ้าน ชนเสาไฟ ชนตึกไปเสียก่อน ตรงนี้ควรตั้งทุกครั้งที่เปลี่ยนสถานที่นะครับ เพราะสภาพแวดล้อมเปลี่ยน ความสูงของสิ่งกีดขวางรอบข้างก็เปลี่ยนครับ
6. Hover
ลอง take off ดูเตี้ย ๆ hover นิ่ง ๆ สักพักครับ เพื่อดูว่ามันมีอาการแปลก ๆ หรือไม่ เสียงมอเตอร์ปกติดีมั้ย ตรวจสอบว่า GPS รับสัญญาณจากดาวเทียมได้ไม่ต่ำกว่า 8 ดวง เพื่อความเสถียรในการบิน GPS mode จำนวนดาวเทียมยิ่งเยอะ ยิ่ง lock ตำแหน่งขณะบินได้แม่น สามารถ hover นิ่ง ๆ ได้มากขึ้นครับ จากนั้นลองโยกสติ๊กซ้ายขวา หน้าหลัง การเบรค การหมุนตัว สังเกตอาการของตัวลำดู จนมั่นใจว่าไม่มีอะไรผิดปกติแล้ว ก็ได้เวลาปล่อยวิหกสู่เวหาครัช!
…
หมดละ วิธีการ pre-flight check แบบลูกทุ่ง ๆ ของผมก็มีเท่านี้ครับ
สำหรับท่านที่อยากได้แบบละเอียด ๆ เป็นทางการหน่อย มีฝรั่งทำ checklist เอาไว้จริงจัง จริงใจ และจิงโจ้ อยู่ครับ (เคย save ไว้จาก facebook group ตอนนี้หาโพสนั้นไม่เจอแล้ว เลย refer ไม่ถูกครับ ใครทราบ reference ช่วยบอกด้วยนะฮะ)
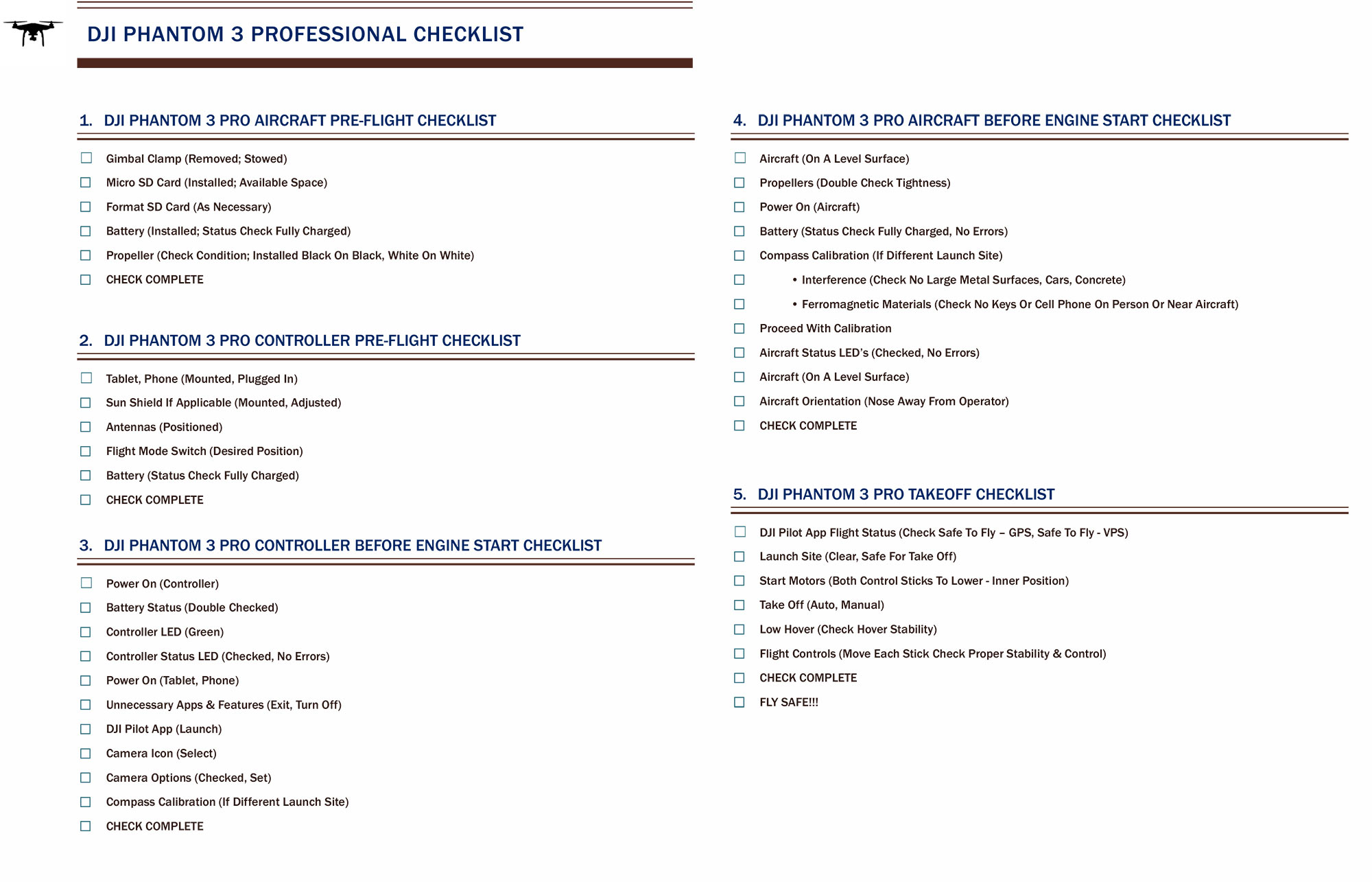
หรือ download แบบ PDF ได้ที่นี่ >> DJI PHANTOM 3 PRO CHECKLIST [PDF]
…
สุดท้ายก็ฝากถึงชาวโดรนทุกท่านนะครับ เคารพกฎกติกา และหลักการความปลอดภัยสากลกันนะฮะ No Fly Zone บ้านเรา นอกจากสนามบินแล้วก็ยังมีสถานที่ราชการ เขตพระราชฐาน อีกเยอะนะครับ ทางที่ดีก็ขออนุญาตทางสถานที่ก่อนบินจะดีที่สุดครับ ผมทราบดีนะครับว่า ท้องฟ้ามันก็เป็นสถานที่เปิด ใครจะบินก็ได้ แต่ท้องฟ้าก็ไม่ใช่ของเราคนเดียว บางครั้งเมื่อมีใครไปร้องเรียนเจ้าหน้าที่ที่ดูแลสถานที่นั้น ๆ แล้วเค้าสามารถตอบได้ว่า อ๋อ โดรนของคุณเติร์ดครับ มาขออนุญาตเรียบร้อยแล้วครับ ปัญหาจะเบาลงไปเยอะมากและทันทีนะครับ ทั้งทางฟากเจ้าหน้าที่เอง และทางฟากคนที่ตกใจแล้วมาแจ้งเจ้าหน้าที่ ก็จะได้คำตอบกลับไปในบัดดลฮะ
สุดท้ายฝาก infographic จากฝรั่งอันนึงไว้ฮะ DOs and DONTs ในการบินโดรน เข้าใจง่าย ได้ประโยชน์ดีครับ


Reference : http://www.channelnewsasia.com/news/singapore/online-application-for/1887440.html
480 thoughts on “Pre-flight Check ทุกครั้งก่อนบินโดรน”
Comments are closed.